I joined the Ottawa Hacker Challange where you get a mystery sensor and this time it was a light sensor that need to be used.
For some time I wanted to make a simple robot and after watching lots of line following robots I now decided to make a light following robot.
I got a basic chassis

I added some hardware to read the encoder wheels
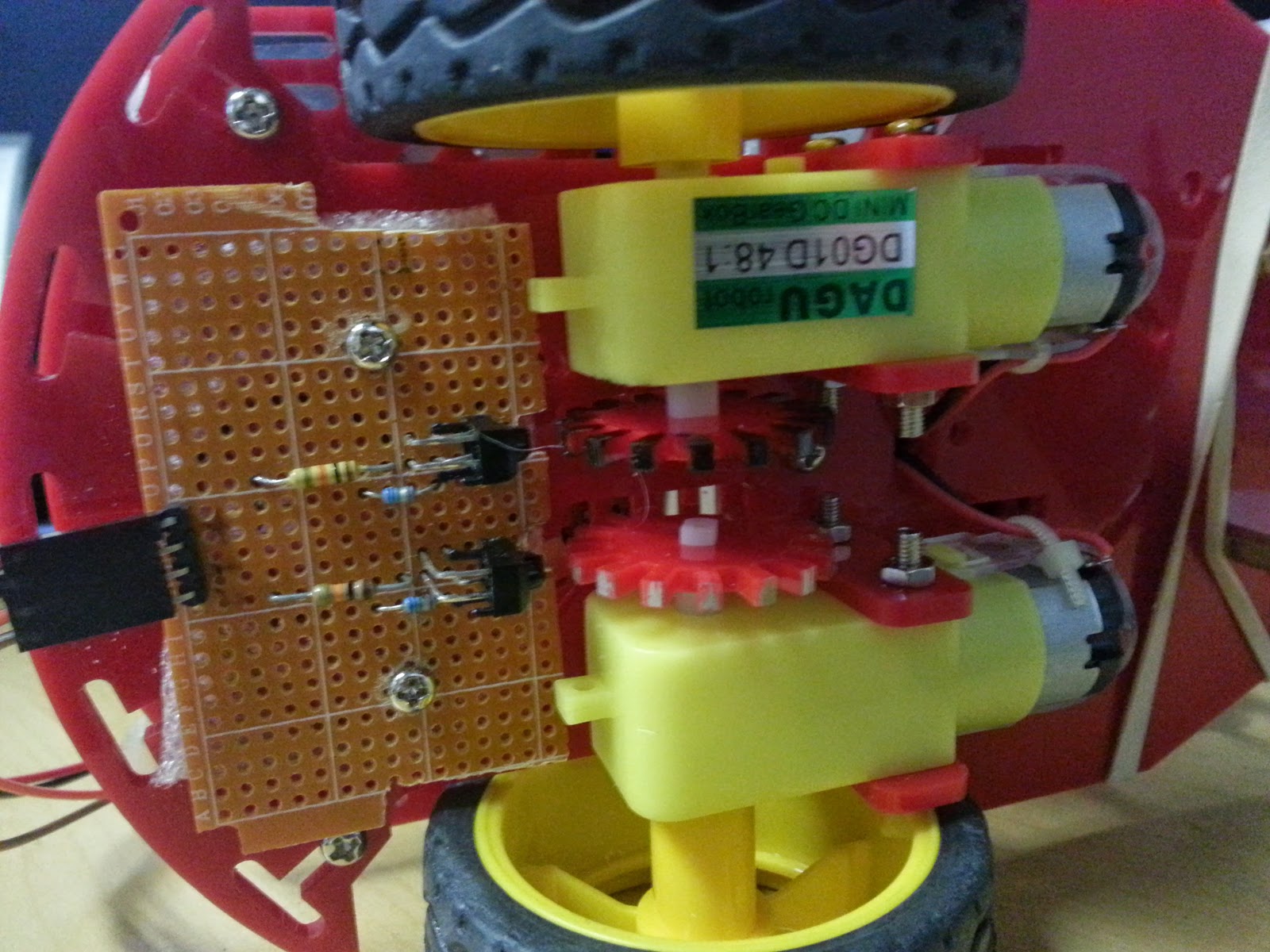
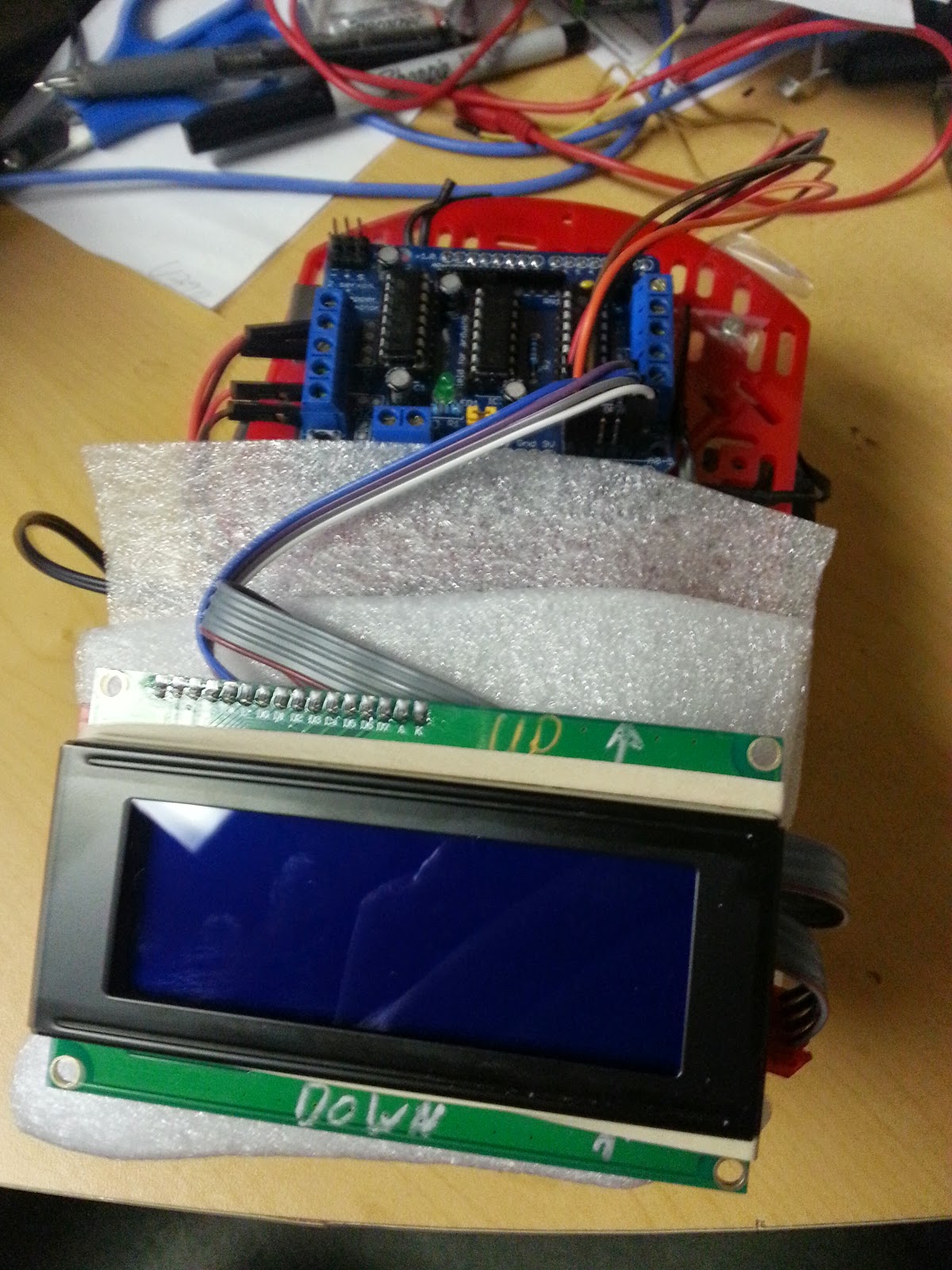
to be able to control the direction and a I2C based LCD to show some numbers.
Got it to partly work but the motors are so weak and unbalanced that when I go full speed on one and 60% on the other it still can't go straight and when I go below 60% it stops completely.
While pondering on what to do I passed by a thrift store and found a simple radio controlled hummer that I bought for $10.

The default function is binary, it's full speed forward or back and full tilt left or right so it's limited but I'm not interested in that part, I did go for the chassis. A single motor that I can control the speed on, replace the full tilt servo with one I can control with better precision. Add the sensors and so on and I have something that might work.
So far I only managed to rip out the provided electronics and put in my servo but I'm not sure if it's strong enough.

Update1:
Added the controller and got it to move around. It is moving a little at 25% and is to fast at 100%.
Steering works but is somewhat limited, no more then 20 degrees left and right (=total of 40) but it was like that before I changed it so it's not my mod that caused it.

What's left now is to figure out how to mount all parts and some programming. May need to add some kind of remote control to stop/start it or it will drive around at some predefined speed all the time.
Update2:
Cut a hole in the cover so now the cover can be put back but with electronics showing I will have to stay away from the mud.
Did also start to put together the light sensor holder (the black tube on top of the servo)



In the front is distance sensor to see when it gets close to something straight in front of it.
Have also done coding so it does
* swing the servo
* look for the lightest direction and turns towards that direction proportional to how much off course it is.
* If distance sensor is not alerting a close hit it runs the motor and the speed depends on how much bright the light is compared to average or if some object is somewhat close.
No comments:
Post a Comment